

理想的激光雷达该是什么样?拥有至少200米的有效距离,足够高的信噪比,全固态,全部系统集成在一块芯片内,价格不超过50美元。这就是单光子加VCSEL激光雷达。
对于激光雷达有几个参数尤为重要,激光器的接收功率与效率,很大程度决定了激光雷达的信噪比。激光脉冲宽度决定了激光雷达的深度(也就是Z轴)分辨率,一般来说10纳秒就等于深度分辨率1.6米。脉冲重复频率决定了理论最大探测距离,如重复频率必须低于160Khz才能达到1000米的探测距离。激光雷达还有光束发散角的参数,即毫弧度mrad。1mrad的发散角在光束的1公里处,光束直径为1米,这个数值自然是越小越好。光束角很大程度上决定了X轴的分辨率,光束角越窄,X轴分辨率越高,也对有效距离有一定影响。
激光雷达接收部分对性能影响最为明显。最常见的是传统的PIN型光电二极管,一般使用硅材料,成本低廉,技术成熟,市场上很容易买到,通常对应905纳米硅激光二极管,机械激光雷达都使用这种光电检测元件。其次是线性APD,常见的有硅、锗、InGaAs三种。成本方面,硅的成本还是最低,Ge与InGaAs差不多。硅的缺点是只能对应1000纳米以下波长,不能对应最安全的1550纳米波长。绝大多数MEMS扫描型激光雷达和部分VCSEL型Flash型激光雷达都采用硅APD光电二极管。
Flash型激光雷达一般使用1550纳米波长的InGaAs,以大陆收购的ASC最为典型。再次是单光子(SPAD,Single Phton Array Dector),单光子可以分为两种:一种是单光子加淬灭电阻的硅光电倍增管(SiPM,又叫MPPC),一种是与TDC等外围电路集中在一片芯片里的数字单光子DSPAD。MPPC首先由日本滨松商业化,很容易买到,DSPAD需要特别定制芯片和TDC以及外围电路,以美国的普林斯段光机所和MIT的林肯实验室的DSPAD最为著名,但是牵涉到军事机密,很难与其合作。
众所周知,测绘激光雷达可以穿透树冠层,探测到被森林覆盖的地表的起伏,用在军事上可以探测到被遮盖的地方目标,如坦克最常用的遮盖网对激光雷达完全无效,用在无人车上,可以取得类似透视的效果,只需要一个侧面就可得到物体的全部轮廓,单光子就可以做到。最后还有传统的CCD或CMOS图像传感器。
激光雷达对比
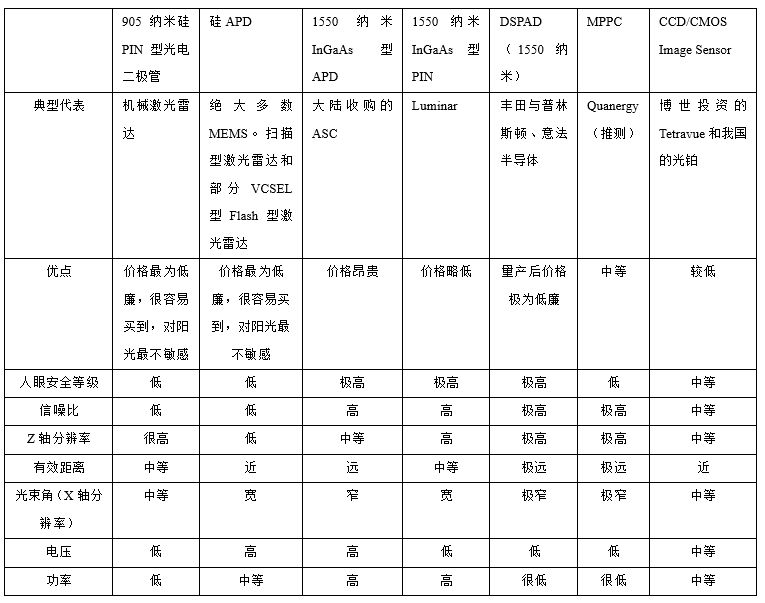
上表对比可见,单光子全面胜出。单光子加VCSEL激光雷达将是最佳激光雷达。
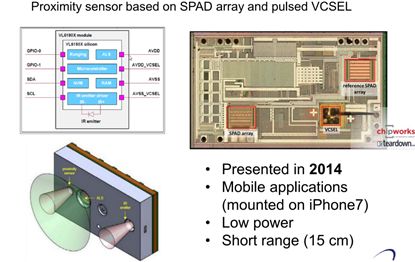
这样的激光雷达雏形早在2014年就已经出现,这就是意法半导体的ToF传感器,目前已经推出了三代ToF传感器,包括VL6180X(第一代)、VL53L0X(第二代)、VL53L1(第三代)。而苹果iPhone 7 Plus中的飞行时间(ToF)测距传感器是意法半导体为苹果公司定制的4代产品,也就是VL6180X。不过VL6180X只做距离测量,有效距离只有10厘米,主要是手机贴近耳朵时自动关闭屏幕,在iPhone8的面部识别中并没有使用,而是使用了苹果拥有专利的PrimeSense技术。
使用了Lumentum和Finisar的VCSEL,之所以放弃意法半导体的方案,一是价格比较高,其次是功耗和体积略大。实际VCSEL价格很低,所占的收入比例在Lumentum里不到5%,微不足道。VL53L0X的有效距离增加到2米。VL53L1的有效距离增加到4.5米,意法半导体在2017年3月声称此系列传感器出货量数亿片,用在70多款手机上。第二代VL53L0X也已经被应用在联想的MOTO G4+、华为的P9、P9+和V8,LG的G5、HTC的M10、MEIZU的PRO6之中。

VL6180X内部就有一个VCSEL发光器和两个单光子检测阵列。使用940纳米的近红外波段,与激光雷达最常用的905纳米非常接近。
关于激光雷达的基础知识还不得不提一下,激光雷达主要包括激光发射、接收、扫描器、透镜天线和信号处理电路组成。激光发射部分主要有两种,一种是激光二极管,通常有硅和InGaAs两种基底材料,硅的价格低廉,波长一般是905纳米,受太阳光干扰最小,但功率增加的话可能对人眼造成伤害,硅的暗电流比较小,灵敏度低。InGaAs价格高昂,波长一般是1550纳米,对人眼安全系数高,可以使用功率比较高的激光器,InGaAs灵敏度高但是暗电流也比较高。
再有一种就是目前非常火热的VCSEL,垂直腔面发射,目前Leddartech的固态激光雷达已经使用了Trilumina的VCSEL,VCSEL的优点是价格低廉,体积极小,功耗极低,缺点是有效距离比较短,需要多级放大才能达到车用的有效距离。
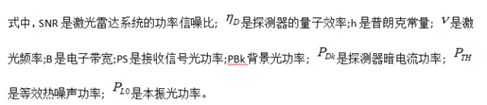
对于传感器来说,信噪比是最重要的参数之一。非相干激光雷达的信噪比SNR方程可以表示为
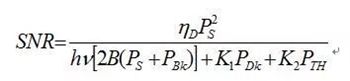
从上面公式可以看出,要提高信噪比,最简单有效的方法是提高接收信号光功率和量子效率。单光子或者说盖革模式下的APD其量子效率是机械旋转雷达用的硅PIN二极管的数百乃至上千倍。
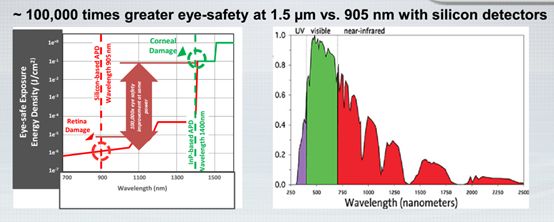
要提升功率,就不得不考虑人眼安全,对于常用的905纳米来说是不合适的。1550纳米的InGaAs,和905纳米的硅光电探测器相比要安全太多了,可以毫无顾虑地加大激光器的功率。固态激光雷达领域知名的Luminar就是以使用1550纳米的InGaAs为特色的,其使用的激光器的功率是传统硅光电系统的40倍,不仅提高信噪比,减小脉冲宽度至20纳秒以下,脉冲重复频率低于100MHz,占空比低于1%。同时提升了有效距离,在雨雪雾天,物体的反射率会降低,导致激光雷达有效距离缩短,不过加大功率,就可以解决这个问题。Luminar就是这么做的,Luminar强调即使10%反射率的物体,有效距离也可以达200米。
关于激光功率的放大,Luminar申请了专利。其专利是用二级大模场掺铒光纤(EDFA)放大器将一个种子源激光调制为一个脉冲宽度至20纳秒以下,脉冲重复频率低于100MHz,占空比低于1%的脉冲激光系统。Luminar的专利核心一个种子源激光,另一个是掺饵光纤放大器。
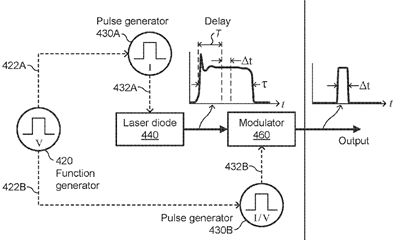
上图为Luminar的种子源激光器内部构成
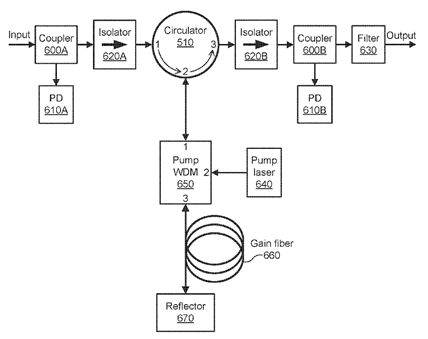
上图为Luminar的放大器内部构成
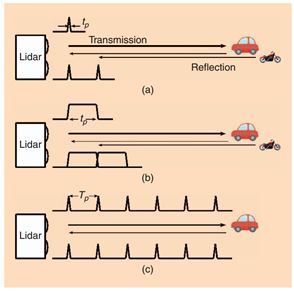
通过上图我们可以看出,激光雷达的Z轴分辨率取决于脉冲宽度,激光雷达里有个简单的公式,激光雷达的Z轴分辨率是脉冲宽度的1/6,10纳秒的脉冲宽度分辨率大约就是1.6米。Velodyne的64线激光雷达HDL-64E早期的脉冲宽度是10纳秒,据说改为双反射后提高到5纳秒。大部分固态激光雷达一般是50-150纳秒,单光子可以轻易做到1纳秒甚至是几十皮秒,远远好于大部分激光雷达。
对于固态激光雷达的低分辨率,Velodyne与EPC公司合作解决了这个问题,EPC擅长GaN功率器件技术,GaN是一种宽带隙半导体材料,用这种材料制造的场效应晶体管比传统晶体管开关速度提高10倍以上。在Velodyne的固态激光雷达Velarray就使用了GaN场效应管,据说脉冲宽度达到了1-5纳秒。这也是全球首款用在激光雷达上的GaN场效应管,EPC为激光雷达准备了多个选择,包括EPC2040和EPC2016,后者不仅能让脉冲宽度低于5纳秒,并且峰值电流达75安,电压达100V,高功率会带来高信噪比,不过这功率似乎太大了点。顺便说一句EPC2040是EPC公司设计,台湾Episil(汉磊)制造的硅基GaN HEMT(高迁移率晶体管)器件,价格比传统的场效应管贵大约20-40%。
开年后首场ADAS自动驾驶盛会,45+场专业演讲值得期待

一、会议组织
主办单位:

支持单位:

媒体支持:

二、会议主题
-
ADAS技术、法规与市场
-
主机厂ADAS应用及发展趋势
-
商用车及工程车自动驾驶落地技术
-
ADAS芯片、软件和算法、主动安全、无人驾驶
-
自动驾驶、ADAS及人工智能
-
行人和障碍物检测、疲劳检测、交通标志识别等
-
自动泊车、低速无人车的技术及应用
-
汽车传感器:Lidar, Radar, 红外、CMOS图像等
-
车载内视/外视/环视/环境感知与信息融合
-
域控制器、车载以太网、汽车E/E架构
-
AUTOSAR、ISO26262、信息安全和功能安全
-
路测、场测、虚拟仿真测试
-
激光雷达在自动驾驶系统中的应用及发展
-
高精度地图、V2V/V2X 等
-
ADAS开发,测试及评价技术
-
自动驾驶投融资与战略合作
三、会议时间与地点
2018年3月20日-21日 上海
四、已确定和拟邀演讲嘉宾名单
3月20日 主论坛:ADAS与自动驾驶综合
1,上汽大众驾驶辅助和智能驾驶技术研发现状及其发展
上汽大众 前瞻技术经理 朱国璋
2,汽车安全到自动驾驶技术研发
吉利汽车 研究院资深总工程师 刘卫国
3,蔚来已来
蔚来汽车 工程副总裁 黄晨东
4、地平线机器人 创始人&CEO 余凯博士
5,实现自动驾驶的关键技术
清华大学计算机系 教授 邓志东
6,智能汽车未来发展趋势
比亚迪汽车 智能化总监 赵龙
7,东风汽车 智能信息室主任 李凯
8,爱驰亿维 前瞻技术副总裁 丁华杰
9,通往未来出行之路 自动驾驶
博世底盘控制系统事业部 产品经理 丰浩
10,智能网联汽车测试评价及检测认证
中国汽车技术研究中心智能汽车室主任 郭魁元
11,从辅助驾驶到自动驾驶
纵目科技 创始人&CEO唐锐
12,奥迪A8的域控制器应用技术
TTTech
13,深圳镭神智能
14,...........
3月21日分论坛一上午:商用车及工程车自动驾驶落地技术
1,卡车实现自动驾驶技术
沃尔沃集团前瞻技术研究部 刘奇 博士
2,自动驾驶在智能物流领域的应用
智加科技 (PlusAI) 创始人&CEO 刘万千
3,无人小巴的商业化思路及技术挑战
苏州青飞智能 CEO 孙一飞
4,工程机械车辆的自动驾驶技术
中联重机 方啸 博士
5,工程机械车辆的智能环境感知和自动驾驶控制
北京踏歌智行 创始人&CEO余贵珍博士
6,港区无人驾驶集卡如何完成技术落地
主线科技 CEO 张天雷
7,港区作业的无人驾驶集卡
西井科技 (拟邀)
............
3月21日分论坛一下午:自动驾驶传感器和感知系统
1,单目摄像头实现自动驾驶的视觉
Minieye 联合创始人&副总经理 周翔
2,ADAS安全辅助驾驶系统图像处理技术
韩国MOVON 中国区首席代表 Jeff Song
3,双目视觉感知设备的产品化之路
北京中科慧眼
4,高精度地图助力自动驾驶落地
四维图新 高级副总裁 白新平
5,上海欧菲智能车联科技有限公司 段勃勃 博士
6,最新国产激光雷达技术
杭州光珀
7,深圳前向启创 总经理 熊志亮
8,基于FPGA平台的ADAS及高度自动驾驶解决方案
深圳市自行科技有限公司 关艳峰 总经理
............
3月21日分论坛二:汽车网联技术、自动驾驶测试
1,5G技术助力自动驾驶落地
联通智网
2,华为5G产业发展总监兼5G车联网总经理何超
3,国家智能网联汽车(上海)试点示范区建设规划及进展
上海国际汽车城 李霖 博士
4,拥有更高宽带的汽车以太网应用
博通 中国区市场经理 邓涛
5,Traffic21 Institute , Carnegie MellonUniversity (拟邀)
6,新一代智能车联网体系架构及解决方案
兴民智通 智能汽车事业群COO张人杰
7, 5G与自动驾驶
中国移动
8,星云互联
9,通用、安波福等企业无人车技术剖析
佐思产研 研究总监 周彦武
10,VECTOR (拟邀)
11,吉林大学汽车仿真与控制国家重点实验室 (拟邀)
12,Transportation Research Institute ,University of Michigan (拟邀)
13,网联汽车-行驶在互联网中
德国FEV 车辆电子电气工程监理商哲
............
活动报名
如需演讲、赞助、参会请联系:
上海 赵志丰 18702148304(同微信)
邮箱:jerry.zhao@shujubang.com
北京 符兆国 18600021096(同微信)
邮箱:fuzhaoguo@jointwyse.com





 扫一扫关注微信
扫一扫关注微信