

万蕾:今天来了不少国际友人,我今天还是用英文做演讲,非常高兴有机会在这里跟新老朋友分享我们的经验,以及我们在智能网联汽车方面所做工作,我们认为标准是至关重要的,我们认为标准能够赋能智能网联汽车行业。近年来,我们看到汽车行业有了越来越清晰的发展路线图,主要是三个方面的趋势,首先是电气化,或者电力化,现在已经有超过6个国家发布了目标或者路线图,决定完全摒弃传统燃料汽车,比如荷兰提出了2025路线图,完全摒弃传统燃料汽车,印度是2030年,法国是2040年,中国作为汽车的最大市场,也发布了他的路线图,目标是新能源汽车达到20%的市场占比。

在五年之后可能很少有消费者购买传统燃料汽车,接下来几年大部分汽车将是新能源汽车,另外两个发展趋势就是智能和网联,我们做智能网联汽车领域也在不断的探讨两个趋势,在智能网联汽车方面的发展路线图,基本上跟电气化的路线图是基本对应的,这三个趋势的发展,也意味着在未来五年汽车行业会面临着一个巨大的变革,而不是演变。这也给我们提出了艰巨的挑战,同时给我们带来了巨大的机遇。
在智能汽车方面,整个行业里每个人都在探讨一个问题,我们是不是只依靠ADAS系统?事实上如果我们纵观全局,我们会发现在一些特殊的条件下,比如说糟糕的天气情况,冬天冰雪道路、雨天、雾天,会有视觉的危险,紧紧依靠ADAS是没有办法保证的,过去几年我们看到一些糟糕交通事故的出现,跟自动驾驶汽车的道路测试相关,比如说2016年1月份一辆特斯拉没有检测到公路上的一名清洁工,清洁工死于这场事故,2018年3月份在优步的自动驾驶汽车测试当中也发生了事故,一名行人因此死亡。
根据我们的数据统计,大约60%的事故没有办法被ADAS系统识别,没有办法成功避免。但是在C-V2X,也就是蜂窝车联网技术下,我们可以提供更长的反映时间,提供更宽泛的时间,蜂窝车联网技术对我们是非常有价值的一项技术,ADAS系统和蜂窝车联网技术是可以互相补充的。
我们在讨论V2X的时候,我们知道有两个解决方案,十年之前SAE就发起了这方面的标准化工作,当时发布了IEEE802.11p标准,他们提供了很多的经验,很多的知识,这份标准是提出了蜂窝车联网的基本框架。我们的编码技术,以及高级的通讯技术,以及无限数据通信技术标准的生态环境,导致我们的车路协同,导致我们目前通讯覆盖面比此前高了2倍,使得车主可以更加地时延的方式,在1-2秒的延时情况下就可以实现沟通,另外一点,我们的车联网能够实现或者蜂窝车联网实现更加快速的联网,对蜂窝车联网来说能够利用的更高层的使用,比如语音控制都可以实现,随着时间的同意技术都是指数性发展的,十年之后,我们都知道所谓摩尔定律,十年之后都会比此前的性能更好。很多人在讲5G信号,跟我们车载WIFI有什么区别呢?首先我们在2014年真正落地开始实现蜂窝车联网,当时我们已经实现了基本的安全服务,同时端到端的延时是20秒,同时它的覆盖面是500米,以及波动性,速率可以实现500公里。随着相关车路协同的支持,车联网的支持,现在我们的蜂窝车联网已经开始有飞速的发展。

在一个月之前,3GPP设计了车路协同平台,实现高端的解决方案比如说协同驾驶,也就是说相邻车辆可以分享感应器收集的信息,我们希望能够在未来选择更加宽的带宽实现这种技术。和5G汽车联盟的合作让我们更好的实现蜂窝车联网的落地,在车内的车载设备,以及我们路边的设备,未来可以实行互联,作为人我们可以使用现在的技术设施,就可以实现高效互联,不需要拆掉重建,车联网系统的标准不仅限于车车互联,比如在欧洲的系统,他们开始在蜂窝车联网方面进行研究,同时5G汽车联盟,5GAA是叫做5G汽车联盟,2016年正式建立,现在已经超过100多个会员。他们在促进不同机构之间的合作,形成端到端的车车协同的合作,这是非常有用的。对整个行业来说都是有好处的,而且5G汽车联盟内有大的主机厂、大的联盟机构促进行业发展,中国也在促进,也提供智能网联汽车的标准系统,今天早上冯先生已经提到过,工信部已经发布了相关的指导文件。这也将会促进智能网联汽车未来合规,特别是在落地的城市当中促进汽车发展。

中国的蜂窝车联网商业化的路线图,去年10月25日工信部已经提出了“蜂窝车联网PC5的频谱计划”,是关于智能网联汽车直连通信使用频段的管理规定,同时在2018年12月25日,工信部印发了《智能网联汽车产业发展行动计划》,实现蜂窝车联网在部分高速公路和城市主要道路的覆盖,开展5GV2X示范应用。无锡已经成为中国城市集的互联网城市应用基地。在170平方千米的范围内实现蜂窝车联网的测试,无锡市政府也在提供26个应用的证书。有助于我们在智能互联汽车上的批准,同时还有在很多大型的省会已经推行了9个蜂窝车联网的实体测试项目,我们这个行业的第二个里程碑,在商业化方面,去年11月份实现的,由于我们的汽标委,以及中汽中心的支持,我们实现了三个芯片供应商,以及10个主机厂的共同合作,共同验证,我们这个生态系统的成熟度。也就是说我们现在系统和系统之间能够有非常好的连接。今年4月份,也就是上个月有13个移动公司,共同推出了蜂窝车联网的商业化路线图,在未来两年,实际在智能驾驶汽车上使用蜂窝车联网技术。
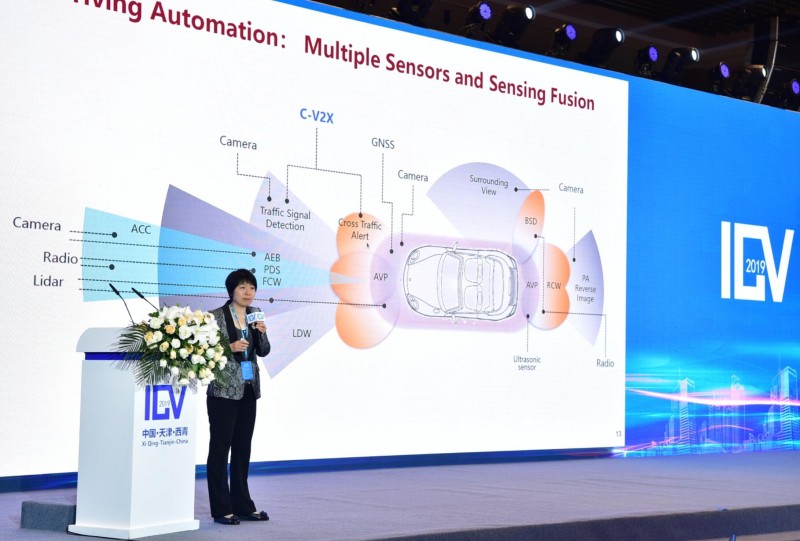
美国汽车工业协会定义了自动驾驶汽车的五级,基于三点进行划分,首先第一个就是汽车纵向和横向的驾驶行为,第二个是等级划分是基于动态任务,由人还是机器划分,自动驾驶汽车是根据动态驾驶任务的支援,是由人还是电脑,以这三个标准划分汽车等级,人们正在辩论,到底是三级还是四级自动驾驶汽车更加复杂,为了对接这样的分级,国际标准化组织已经要出台不同等级的标准,比如说通过不同的技术,在不同的等级形成不同的标准。自动驾驶汽车主要是基于多种车载感应器来实现自动驾驶,越来越多的公司提供解决方案,将车载感应器和蜂窝车联网技术实现车的真正互联,车路和车车协同。
之前有同事提到过,安全对交通是非常重要的,但是自动驾驶汽车是非常复杂的系统,所以说ISO20262这个传统标准已经不够了,今天早上有介绍,我们了解了预期功能安全标准已经面世了,我想重点强调两个很重要的案例,2016年优步出了一个事件,当时在一天晚上,特斯拉也出了一个事件,车联网在感应的时候没有看到一辆正在高速行驶的白色货车,把白色货车看成一朵云,导致车辆事故,车辆无法及时的做出正确决策,这种道路状况无法满足我们所需要的功能性安全,这个也是事前没有预料到的,这个也是ISO新出台的标准需要覆盖到的。
2016年出现了另外一起事故,360和浙江大学在做汽车安全测试,基于信号干扰的数据,检测了在感应器无法感受到前方,或者盲道检测方面,智能驾驶汽车的表现,最后发现由于感应器失灵导致无法感应到前方的物体,最后出事故,像这种信号干扰的情况也是需要我们未来解决的。由于在未来信号将会越来越密集,我们现在的技术无法解决信号干扰的情况。所以我们需要引入一系列的机制来解决信号干扰,解决波形的问题。
这个也是ISO的发展,有超过500家公司建立了一个架构,来支持无人驾驶汽车的发展。在今年他们注重的是感应器界面,也就是感应器融合处理器,中间体他们也在研究,无论是OTA软件升级还是蜂窝车联网技术,对自动驾驶汽车来说需要大量的摄像头接入,有些摄像头需要雷达和激光雷达,这些都会产生大量的数据,在非常短的时延实现车路和车车协同,通过高功量的处理器处理这些数据,有时候我们也需要车载的网络传输。我们在车内网络方面,未来需要提供更高的传输速度,尤其是在车内数据传输方面要提供更快的速度。现在这个市场的发展是非常迅速的,所以我们需要去引入一个标准化的方式,从2011-2013年我们已经完成了1GB每秒的传输速度标准,2020年我们将会发布新的标准,10GB每秒的传输速度。同时我们还有另外的工作,速度更低的以太网传输标准,10兆每秒的传输速度标准,这方面主要是考虑到成本。
之前讲的都是跟标准相关的内容,如果我们要实现智能网联汽车真正的商业化应用,我们必须要行业的努力,我们需要在基础设施方面,同时在设备方面和车辆方面做好充足的准备。根据预期,到2030年公路里程当中大部分都会安装上数据追踪和记录系统,包括智能的交通标识,智能的信号灯等等,所以我们需要去升级目前的基础设施,同时也要升级现在的交通相关设备。
我们数据传输需要实时的监管和监控功能,同时我们在传感器方面,以及传感兼容系统方面也面临着很大的挑战。包括CPS、摄像头等等设备,对于一般人来说,我们需要关注的是在传感方面,我们需要传感的融合,需要新的车内的软件平台,我们需要构建车内网络的基础设施和架构,更好的融合以太网和新的传输方式,真正提供安全的驾驶体验,我们认为在未来几年,我们能够真正的提供这种安全的驾驶体验,前提是智能汽车要有更加安全、更加完善的基础设施,谢谢大家。





 扫一扫关注微信
扫一扫关注微信