

激光雷达前装上车,毫无疑问是2021年智能驾驶领域最热门的话题,整个行业一致认为:激光雷达出色的感知性能将为智能驾驶带来更安全更舒适的体验。
但是,部署了激光雷达之后,怎么知道它对智能系统感知能力的提升到底有多少?是否能达到预期?激光雷达+摄像头+毫米波雷达的多传感器融合系统整体性能到底如何?
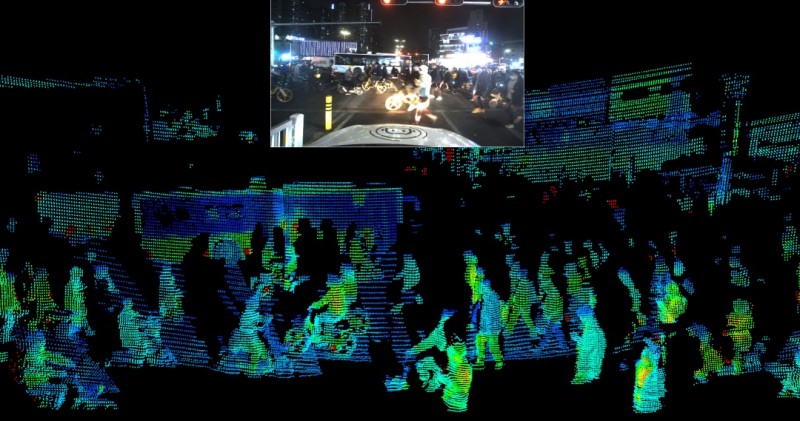
△车规级固态激光雷达M1实测点云,将在Q2启动定点项目量产交付
答案:测评 !
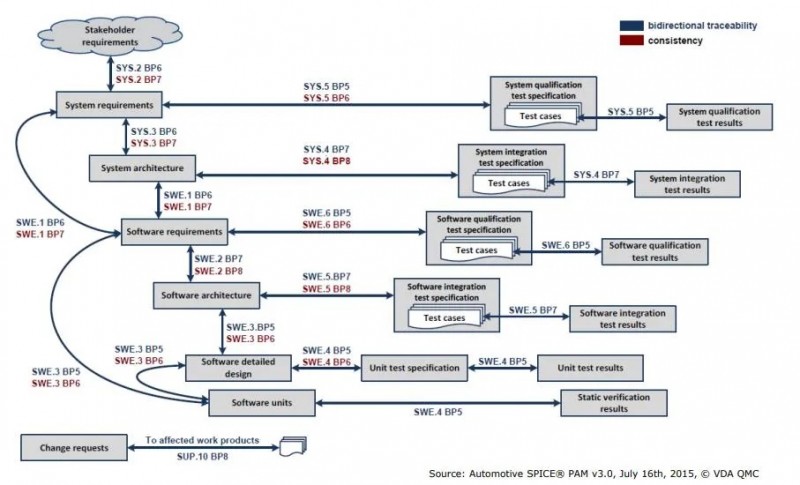
△汽车行业项目开发模式中研发设计与测试验证各占一半
在严谨汽车行业开发体系中,研发设计与测试验证几乎各占一半,后者基于项目需求目标,客观测试并评价感知系统的性能和不足,为每一个关键节点指明开发方向,让整个项目开发处于“Know How”的状态中向前推进。
激光雷达作为一种新型的车用传感器,其数据可靠性、算法检测性能,理论上远高于摄像头和毫米波雷达,过去应用于摄像头和毫米波雷达测评的标准和工具,根本达不到测评激光雷达的水平。
△基于车规级固态激光雷达M1的实时感知表现,检测性能优于摄像头和毫米波雷达
必须基于更高的标准,针对激光雷达及传感器融合感知系统测评,开发一套高水准的测评标准和工具。
深知测评的重要,早在车规级MEMS固态激光雷达M1项目立项之初,RoboSense(速腾聚创)开始布局真值系统+测评工具链:RS-Reference。该解决方案产品推向市场3年以来,已服务于多家国际顶级OEM和Tier1。
下文将以最新版本RS-Reference 2.1为例,讲解激光雷达及多传感器融合感知系统的测评标准和工具链。

△RS-Reference版本迭代历程,方案长期持续优化升级,测评功能模块与软件工具链丰富

什么样的数据才能作为真值数据
测评就像考试,改卷打分需要参考答案,真值数据就是感知系统测评的“参考答案”。
所以真值数据一定要比待测系统(DuT)更准确,在检测性能及几何误差指标等全方面表现都是比待测系统(DuT)高一个层次存在。
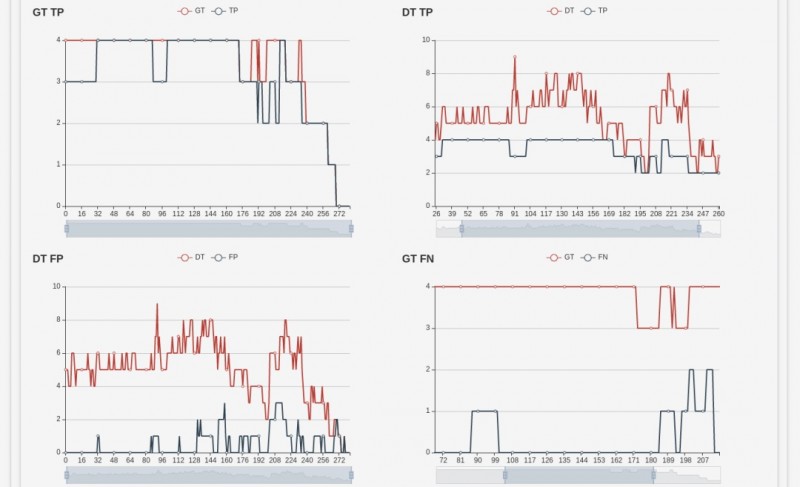
△基于真值数据对待测感知系统的检测性能分析,图中简写含义:GT(真值)、TP(待测系统检测正确的目标)、DT(待测系统检测出来的目标)、FP(待测系统的误检目标)、FN(待测系统的漏检目标)
真值数据囊括智能驾驶感知系统所涉及的众多信息,既包括障碍物类型、速度、位置等动态信息,也包括车道线、道路边界等静态信息。同时,智能驾驶所面对的交通场景繁杂多变,严格地测评激光雷达及感知系统所需要的多场景真值数据量达到PB级。
在开发迭代中,伴随测试与研发升级循环交替,对真值的需求不断更新,真值数据的生成效率要跟上开发需求,不能因此拖慢项目进度。

PB级高质量真值数据如何获取
如上文所述,标注质量和生成效率是测试对于真值数据最为关注的两大维度。
传统人工标注方法,对每帧数据的目标进行逐个标注,标注时间长且人力成本巨大,1天采集的数据量大约需要1名标注员处理3年,约等于1:1000(1天的数据需要花1千天标注),标注效率极其低下,根本无法满足频繁的测试需求。在标注能力上,人工方法存在显著缺陷:由于逐帧静态数据的标注方法,无法标注动态物体的运动速度和加速度;由于单帧数据对物体外形的重构不完整(比如单帧点云中前方车辆通常只有一个L型面),标注框尺寸大小的准确性也无法保证。
RS-Reference提供一套智能化的真值生成&测评解决方案,以近乎于1:1的标注效率输出检测性能和几何误差指标远高于实时感知、人工标注和传统标注工具的真值数据。

△最新版RS-Reference 2.1数据采集传感器系统外观图
「高性能高成熟度的传感器数据收集系统」,采集更精确可靠的原始数据。RS-Reference 选用旗舰级128线激光雷达RS-Ruby、Leopard摄像头、大陆408毫米波雷达、GI-6695 RTK,并在最新的2.1版本中加入两颗近场补盲激光雷达RS-Bpearl,增强对近场盲区感知的测评应用。多款成熟高性能传感器同时采集驾驶环境数据,充分发挥各传感器优势,实现原始信息的全面覆盖、冗余可靠、精细准确。
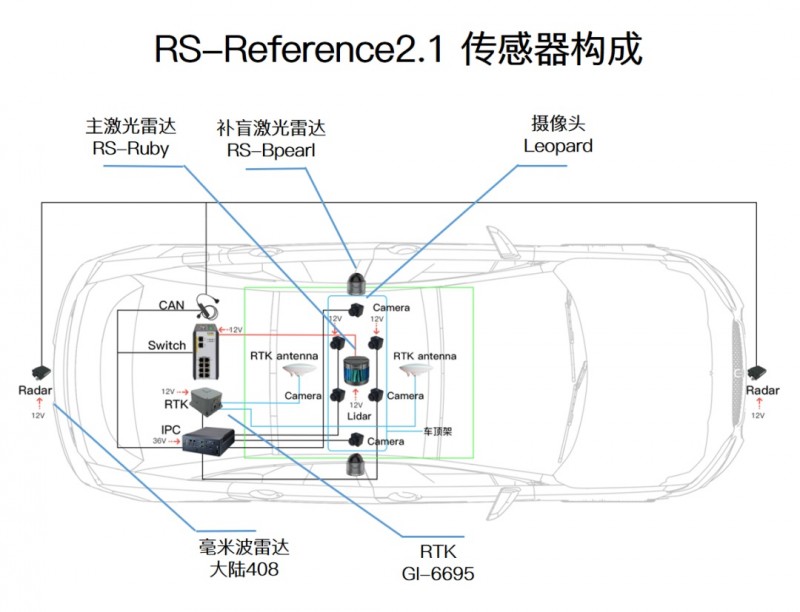
「分体式的顶装部署,无需开孔改装」,最新版RS-Reference 2.1的传感器系统部署方案升级分体式顶置安装设计,可适配不同尺寸的车型,且车体无需开孔,不占有待测方案传感器安装位置,直接测评与量产车传感器方案布局一致的智能驾驶系统。

△最新版RS-Reference 2.1 采用分体式顶装设计
灵活适配不同尺寸测试车型
「积累深厚的感知算法+专用离线处理机制」,快速输出超高质量真值数据。算法是智能化标注超越人工标注的核心,负责真值数据的提取,RoboSense基于超过13年的激光雷达感知算法技术积累,为RS-Reference定制了专用的“离线感知算法”,充分利用多种高性能感知算法技术,配给充足的计算资源,对每一个障碍物数据进行“全生命过程跟踪识别”,悉数提取每一帧的真值数据。
基于对运动障碍物全过程的跟踪和多角度观察,RS-Reference可以实现速度和加速度标注,并通过更全面的形状和大小信息,准确划定标注框尺寸大小,即使复杂场景中紧密相靠的障碍物也能精确分切。
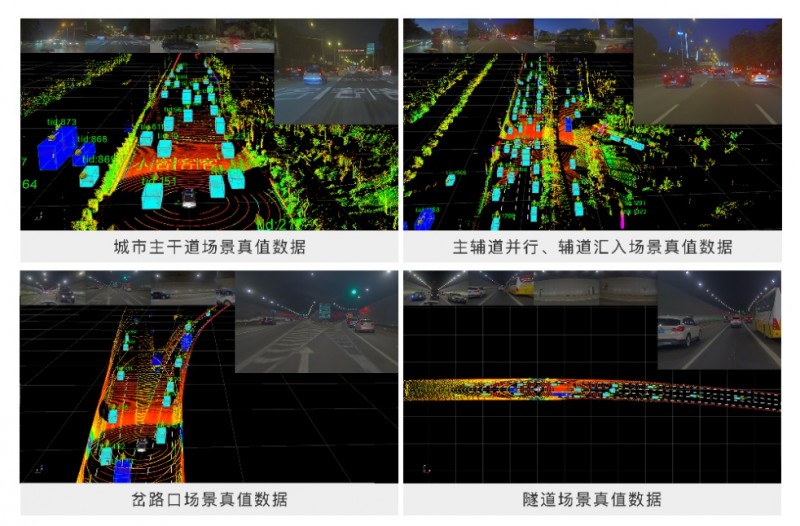
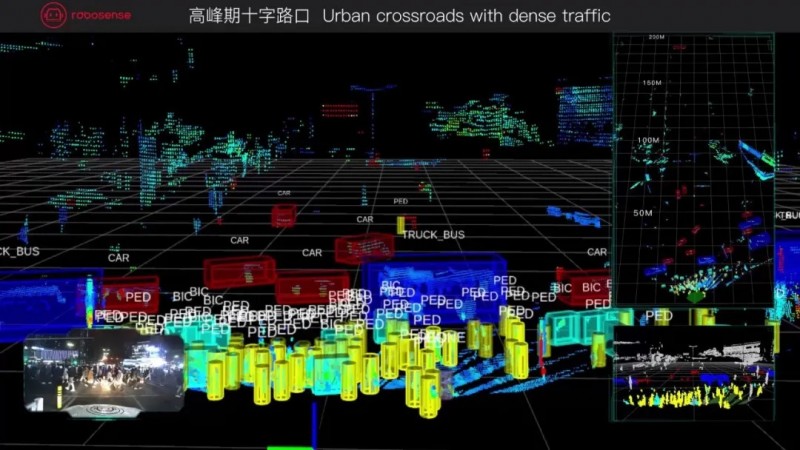
△RS-Reference 2.1生成的复杂场景感知真值数据可视化截图

全栈式测评工具链,可分析各种感知系统
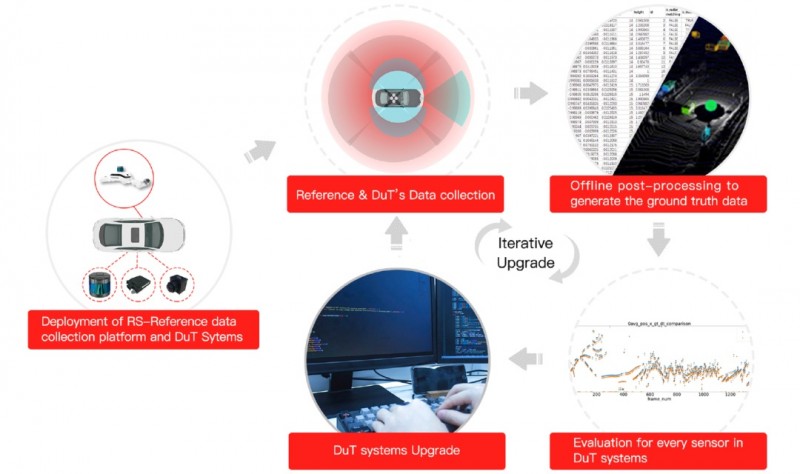
△感知系统开发的测评流程
「全栈式测评工具链」,RS-Reference全栈式工具链包括采集工具、传感器标定工具、可视化工具、人工校验工具、测评工具等等,最新的2.1版本中升级数据管理平台、加入场景语义标签功能,覆盖测评工作的每一个环节。
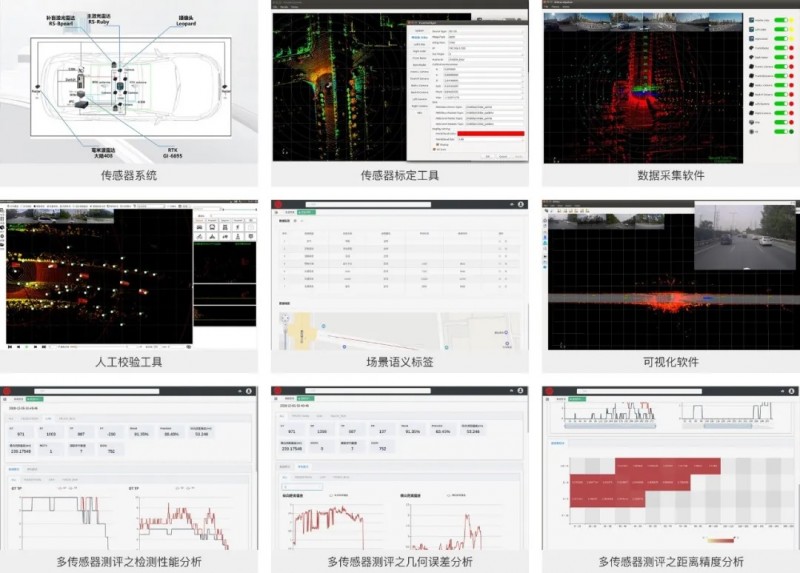
△RS-Reference为真值生成与测评提供全栈工具链
智能驾驶采用多传感器感知融合系统,开发过程中,摸清系统整体性能表现和每路传感器感知性能表现同样重要。唯有清楚系统的整体和每个组成部分的情况,才能为研发指明优化升级迭代方向,保证整个项目推进处于“Know How”状态当中。
「面向多传感融合,针对测评每个传感器」,RS-Reference不但可以对智能驾驶的感知融合结果进行测评,同时根据激光雷达、毫米波雷达、摄像头等不同类型传感器的工作特点,提供针对性的专用测评工具模块,且可按客户需求开发定制化工具模块,深入分析感知系统性能表现。
接下来,在2.2版本Reference中,我们还将释放路牌&路面标识、车道线类别、场景语义识别等项目的测评工具模块。

拓展应用价值巨大的真值系统
规划控制算法开发支持:智能驾驶方案开发者还可以基于RS-Reference搭建大规模驾驶场景库,在感知系统开发完成之前,并行开发规划控制系统核心算法,跳出“感知→规划→控制”串行模式的制约,大幅加快项目开发进程。
赋能仿真:利用RS-Reference在真实场景中生成海量真值数据构建仿真场景,不但可以获得源源不断的数据,而且大幅提升仿真场景数据的真实性。
测评路端感知系统:基于强大真值生成能力和测评工具链,RS-Reference还可以用于对车路协同路侧感知系统感知能力的测评,帮助智慧交通项目开发部署与验收。

获得多家顶级OEM和Tier1认可
RS-Reference推出三年以来,已服务于多家国际顶级OEM和Tier1,帮助多个智能驾驶项目攻克难题,获得客户的高度评价和大量订单。

△众多OEM和Tier1在智能驾驶感知系统项目开发初期就开始使用RS-Reference,并逐步组建规模化测试车队
Tier1案例:某全球知名的智能汽车解决方案企业,与RoboSense正式合作之前,开放性地探讨了用于激光雷达/毫米波雷达的感知评测方案。双方经过两个月的前期沟通和共同方案验证,RoboSense先交付了一套RS-Reference系统。在接下来的三个月里,RoboSense研发团队与客户展开了更密集交流,发现客户更深入评测需求,并对方案进行升级优化,帮助客户很好地解决了测评难题,获得客户的高度认可和多次订单。目前,该客户已经基于RS-Reference系统为测评工具,建立了一支拥有近10辆采集车的测试车队。
OEM案例:总部在国内的某顶级OEM,在经过认真的前期评估后,最终选择了RoboSense提供的RS-Reference系统。完成部署交付后,客户对系统进行了更加严苛的测试和分析,最终RS-Reference以优异的性能表现获得的客户肯定。目前OEM客户已经准备组建一个数十辆测试车的测试车队,使用RS-Reference系统开展后续传感器评测工作。

为激光雷达前装上车提供全套解决方案
作为全球领先激光雷达感知系统解决方案提供商,RoboSense(速腾聚创)在超过12年技术研发和5年激光雷达产品商业化过程中,已经构建起包括MEMS与机械式激光雷达硬件、AI感知算法、硬件融合、芯片等成熟的核心产品技术体系。
我们以此为基础,面向激光雷达前装量产,针对开发、测试、量产部署、算法升级等全生命周期,提供包括车规级固态激光雷达、Reference测评系统、OTA升级服务等全套解决方案,帮助OEM和Tier1的智能驾驶激光雷达前装项目解决各阶段难题,让消费者早日获得更安全可靠的智能驾驶体验。
版权声明:本文系中国汽车纵横网原创文章,如需转载请注明出处和作者,并加上链接:http://www.autochinazh.com谢谢。





 扫一扫关注微信
扫一扫关注微信