

Olivier Fontaine:非常感谢,我刚才上台之前先给我妻子拍了一张照片,大家下午好!首先非常高兴能够来到这里,让我印象非常深刻,非常高兴受到主办方的邀请来参加今天的研讨会。我今天的演讲题目是标准协调,标准统一。为什么法规上的统一可以促进自动驾驶安全,并且迅速的到来。先看一下我发言的框架,首先跟大家介绍一下OICA这个组织,之后介绍一下车辆法规的现状,最后会谈一谈为什么法规的协调如此重要,我们认为它是促进自动驾驶发展的关键。

先看一下OICA这个组织,OICA是我们组织全称的简称,全称是法语,意思是世界汽车制造商组织,各国汽车行业协会的联盟,所以它是协会的协会。我们汇集了来自世界各地的声音,也汇集了世界各地的平台和论坛的声音,像今天这样的会议也是我们非常关注的,我们已经有100年的历史。事实上在今年2月份,我们刚刚庆祝了100年周年纪念,我们在法国的总部庆祝了这一纪念日。从今年年底,事实上是今年11月份,(××先生)会成为OICA的主席。
OICA的主要活动有哪些呢?今天上午也有发言人提到,我们主要的工作领域就是法规的协调和统一,在联合国的层面去促进法规的协调。我们是唯一受到官方认证的全球汽车行业的代表参与到联合国层面的法规协调和制定当中。另外一方面的工作是数据的收集,比如在汽车生产、销售等等方面的数据统计。另外就是我们会举办并参与国际性的车展,除此之外我们也会制定政策建议书,比如对一些关键的政策领域提出我们的建议。我们有38个成员,比如像来自中国的汽车制造商协会,以及来自德国的制造商协会都是我们的会员,还有来自日本的制造商协会,中国制造商协会是我们非常重要的会员。
我们的架构是怎样的呢?我们是隶属于29工作组,我们可以看到29工作组下设立了不同的分工作组,我们通过参与不同工作组的工作极大的促进行业的发展,我们是每一个分工作组重要的成员,因为我们组织汇集了世界各地的制造商,同时我们也积极的参与到道路交通法规的制定与演进当中。在UECE有WP1工作组,关注于道路交通法规的,我们积极的参与到这个工作组的工作中。
再看一下目前为止所取得的成绩,在联合国层面我们致力于促进法规的协调与统一,针对不同的政策领域,最重要的一些领域,一方面是被动安全,比如说安全带碰撞避免,碰撞预防,应该是耐撞性,另一方面是跟碳排放相关的内容,还有一方面是主动安全,像ABS系统定,还有动态控制系统,车道保持系统、胎压检测系统等等。但是自动驾驶的到来,以及自动驾驶的推广对于法规来说是一个重大的挑战,今天上午也有多位讲者提到这一点,对我们来说是艰巨的挑战。
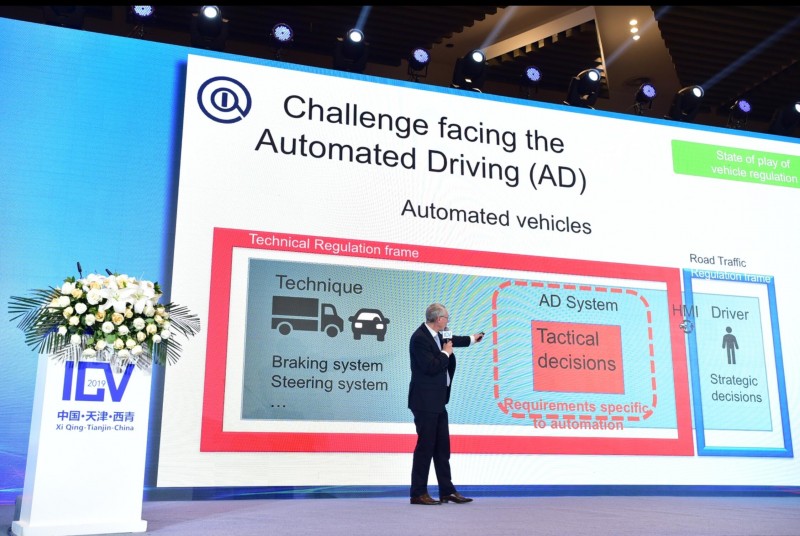
这里有一幅图展示给大家,我们在驾驶一辆传统汽车的时候,我们会遇到一些什么问题呢?大家在左边可以看到,车辆技术方面的因素,右边是跟驾驶员相关的因素。驾驶员是做出各种重要的决定,其中有战略性决定,比如说跟人相关的决定,比如说你沿着什么方向去驾驶汽车,你想要去到什么目的地,还有这个策略性的决定,也就是说你要达到你的目的地,你中间会做什么样的操作,比如向左转,向右转,保持直线行驶,换车道等,这个是我们做的策略上的决定。还有HMI,就是人机界面或者人机接口。驾驶员做出操作的时候,汽车系统也会做出回应。从监管的角度来看左边的这个部分,技术层面的这个部分是否法规能够覆盖所有相关的技术要素,是否能够很好的,WP.29工作组的制定法规和标准是否能够涵盖所有的技术要素,对于驾驶员来说,我们是没有办法通过技术法规来归置驾驶员的行为,归置人的行为,他只能通过交通法规来限制,通过交通规则限制驾驶员的行为。
左边的行为被极大的拓展,变成了现在这样一幅图,有一些策略性的决定,原来是由人类驾驶员做出的,而现在有了自动驾驶之后就由自动驾驶系统来做出了。红色框的范围越来越大,我们的驾驶辅助系统将所有的技术决策都要自我进行,和传统车相比是由系统做出所有的决策,人不参与决策过程,这对驾车来说,对监管来说都是一个很大的挑战。所有的技术决策都是过去由车主在传统车里进行的,现在是由系统代替车主做出决策的,在无人驾驶汽车上,这对监管方是很大的压力和挑战,如果有好的监管来控制或者管理这方面的决策。
目前为止,现如今处于这个阶段,今日我们已经可以通过三个现有的方式来进行测试,同时拿到证书,三支柱的测试方式,通过模拟、审核和实际测试。目前我们已经实现了现实路测,目前我们已经可以实现对实际道路测试,它的排放量,这方面我们已经可以颁发证书了,只是在气体排放方面,未来我们希望对整体的汽车,包括它的安全来进行整车测试。现在我们主要聚焦于整车的安全测试,我们提议能够在社会道路、公开道路进行现实的物理测试,这就是我们三支柱的测试方式。这种测试方式是作为一个补充的测试方式,锦上添花。
这张PPT可以看到横轴代表复杂程度,纵轴代表现实生活中这种驾驶方式可能会出现的概率,在各位的右下角可以看到边缘驾驶情况,这个测试只能在模拟当中,不能在公共场合当中进行测试。第二个驾驶情景叫做重要驾驶场景,最普遍的驾驶场景是在最左边,普遍驾驶场景是可以在公开社会道路上进行实体测试的。可以看到右下角有一个图片,这个图片是一个非常复杂的路况,可以看到有四个行驶的物体在道路上,同时行驶,非常难进行实体测试的,因为每一个物体的速度都不同,都会变化,都是随机的,所以我们这种评估和测试应该在电脑环境当中,在算法环境中进行测试,通过电脑模拟。
第二个测试场景就是重要测试场景,中间这张图也可以利用电脑模拟的方式,而普遍的驾驶场景,这种场景大家可以看到在右上角第一张图,我们可以在公开社会道路上进行测试,一辆正常行驶的汽车,前面有跨越道路的行人。我特别支持实体社会道路的测试,这是我们三大测试支柱,大家在今天早上已经看到过三大支柱方式,多支柱的测试方式主要意义在于补充现有的测试方式,而不是完全代替现有的测试方式。

目前我们在OICA重要的一个目的就是跟各位分享一下我们的重要工作进展,我们希望在未来能够实现真正的道路测试,目前系统安全方面,在中国、加拿大、日本、美国、澳大利亚和欧盟都有,希望在标准互认方面达成一定的成效,在人机交互方面,数据录入方面,实际上在这些汽车行业不同的标准细分方面,这些国家整合在一起,接近90个不同的标准,我们在未来还是需要一定的标准互认,才能让行业不断的发展。比如可以看到我们在自动驾驶汽车方面中国有一套规定,美国有一套规定,欧盟、日本、俄罗斯、韩国有一套规定,对卡车有一套规定,乘用车有一套规定,你这套规定在其他国家能不能适用,在其他车型上是不是适用,你要进入哪个市场,所以对联合国来说目前它是标准互认的核心推手。之前给各位介绍了重要的国家需要进行互认的,这也是我今天演讲的重要观点,联合国是世界自动驾驶汽车标准互认的重要推动力。对自动驾驶汽车,对车联网都是如此,联合国的角色是非常重要的。因为标准互认能够实现市场的整合,避免市场进行进一步的分裂,同时以联合国为基础的全球合作和自动驾驶汽车的标准互认,通过使用多支柱测试方式,可以在不同文化中落地,同时在不同的认证系统中落地,同时可以在不同的自动驾驶等级、自动驾驶级别落地,无论你来自哪个国家,这种多支柱的测试方式都可以应用到你的汽车行业当中,无论来自哪种文化都可以使用这种测试。今天早上也有同事讲到这一点,同时我们这种多支柱的测试方式也不会受到不同国家政策的影响。这是超越目前的测试系统,这种多支柱的测试方式,真正可以促进监管方来实现高度的互认级别和互认水平。
最后,我们多支柱的测试方式,无论你自动驾驶汽车的级别如何,都可以使用多支柱的测试方式进行测试。同时也有助于自动驾驶系统在使用过程当中满足当地的交通法规,我们有这样的自信,我们也希望让车主在使用自动驾驶汽车的时候,自动驾驶汽车是符合当地的交规,我们多支柱的方式可以让车主有这样的自信。
总结一下今天的演讲,对技术监管的标准互认,以及对交通规则的互认,能够促进全球自动驾驶汽车的安全和国际性的发展,感谢各位的仔细聆听。





 扫一扫关注微信
扫一扫关注微信